Research
Remotely Operated CBRNe Scene Assessment & Forensic Examination
The overall goal of ROCSAFE is to fundamentally change how CBRNe events are assessed, in order to and ensure the safety of crime scene investigators by reducing the need for them to enter high-risk scenes when they have to determine the nature of threats and gather forensics.
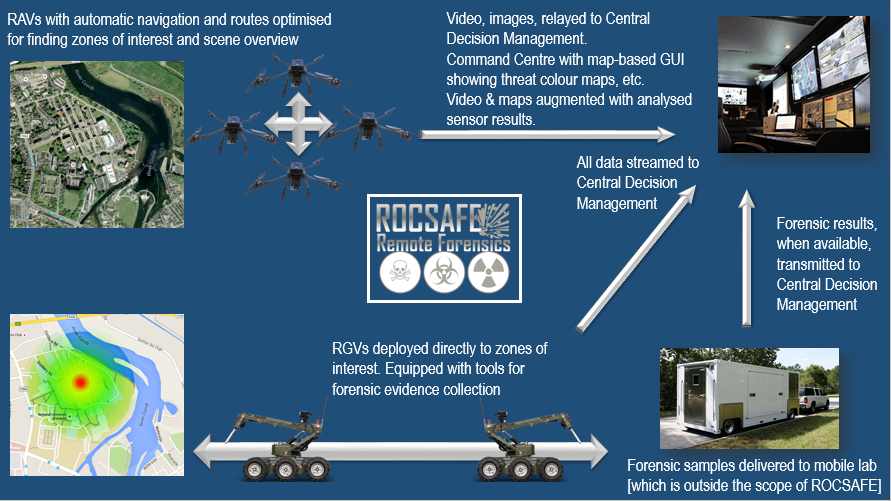
For this, ROCSAFE will make use of cost-effective modern remotely-controlled robotic air and ground vehicles (RAVs/RGVs) that are designed for use in rain, wind, and challenging ground surfaces and obstacles.
First, RAVs will assess the scene. These will have cameras and can carry an array of innovative new high-performance and rugged miniaturised sensor systems for RN, chemical and biological threats.
To reduce the scene commander’s cognitive load, ROCSAFE will include new Central Decision Management software and a Command Centre. All images and data will be streamed to this, where it will be analysed and displayed on a sophisticated and intuitive interface with maps and video, showing results of analytics and giving readings geographical context. This will enable the scene commander to assess the nature of threats, develop an Action Plan and an Evidence Plan, supported as needed by the Central Decision Management. It will also assist in coordinating sensors and mobile units. Its data analytics will provide fusion of multiple sensor data sources, to allow probabilistic reasoning about the most likely threats and likely locations of epicentres.
After the scene is assessed, RGVs will be dispatched to collect forensic material/evidence, with automatically-optimised routes to avoid hazards. They will have innovative new equipment for forensics collection that will automate best practices. Forensic material will be collected, bagged, tagged, documented, and stored by the RGV.
Thus, ROCSAFE will ensure that CBRNe scenes are assessed more rapidly and thoroughly than is currently possible, and that forensic evidence is collected in a manner that stands up in court, without putting personnel at risk.
Public Presentations
Date |
Dissemination Event |
Attendee |
Partner |
|
10/2016 |
The European Forum for the Safety and Security Research. |
José L. Diego |
Valencia Police |
|
11/2016 |
EDA C-IED project team meeting |
Ray Lane |
DFI |
|
11/2016 |
Major Emergency Management National Conference |
Peter Daly |
IAEMO |
|
12/2016 |
ICMC, University of Sao Paulo |
Brett Drury |
NUI Galway |
|
02/2017 |
infodron.es , press note in Spanish news site |
Ramon Pericet |
IBA |
|
04/2017 |
CBRNe Summit Europe 2017 |
Ramon Pericet |
IBA |
|
05/2017 |
COU Brussels |
Brett Drury |
NUI Galway |
|
07/2017 |
Autonomous Systems and Human Factors Perspectives related to man-machine interaction/teaming. |
Michael Madden |
NUI Galway |
Deliverables
Access to publicly distributable deliverables will be available from this web-site.
Publications
Conference |
Title |
Partner |
|
IEEE Games, Entertainment, Media Conference, 2018 |
Using a Game Engine to Simulate Critical Incidents and Data Collection by Autonomous Drones |
NUIG |
|
27th International Joint Conference on Artificial Intelligence, 2018 |
A Virtual Environment with Multi-Robot Navigation, Analytics, and Decision Support for Critical Incident Investigation |
NUIG |
|
2nd International Workshop on A.I. in Security, at European Conference on Machine Learning, 2018 |
A Virtual Testbed for Critical Incident Investigation with Autonomous Remote Aerial Vehicle Surveying, Artificial Intelligence, and Decision Support |
NUIG |
|
ECML PKDD International Workshop on Artificial Intelligence in Security, 2018 |
An Information Retrieval System for CBRNe Incidents |
NUIG |
|
First International Workshop on Artificial Intelligence in Security An IJCAI Workshop Melbourne, 2017 |
ROCSAFE: Remote Forensics for High Risk Incidents |
NUIG |
|
20th International Conference on Solid-State Sensors, Actuators and Microsystems and Eurosensors XXXIII |
GC-QEPAS: a MEMS-enabled Portable Trace Chemical Sensor for Safety & Security Applications |
CNR/CREO |
|
41st PIERS proceedings |
Deployable Sensor for Trace Identification of Hazardous Chemicals in Dirty Environment, Based on FAST Gas-chromatography and Quartz Enhanced Photoacoustic Spectroscopy |
CNR/CREO |
|
International Conference On Innovation And Intelligence For Informatics, Computing, And Technologies, 2019 |
Ground Operations Management using a Data Governance Dashboard |
IAEMO |
